Valve Automatic Machining Line



Nhazi zuru oke
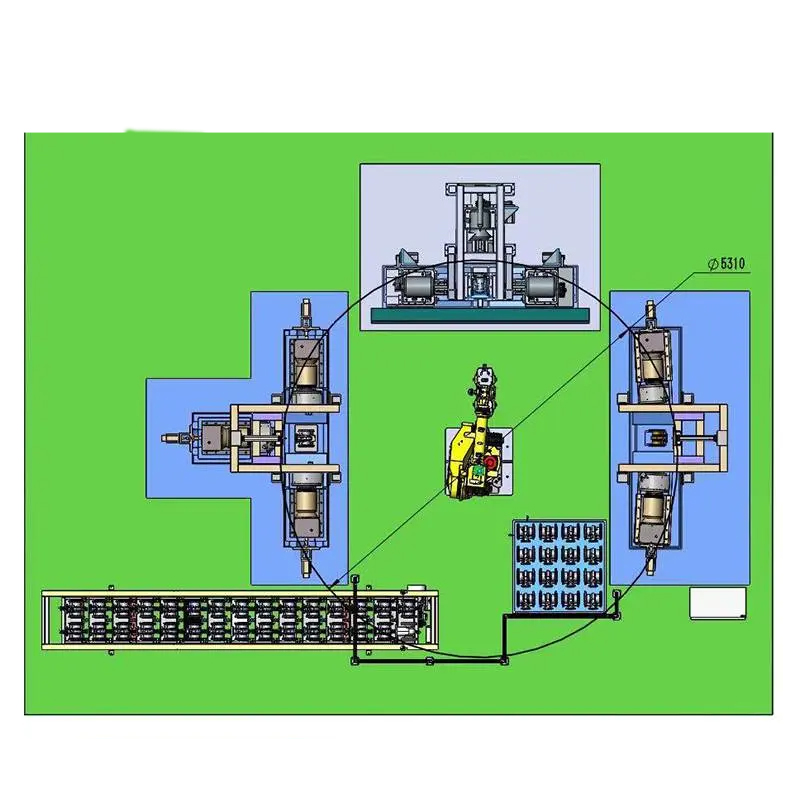
1: Akụrụngwa akpaaka a bụ nke nwere ebe a na-arụ ọrụ isii, ebe a na-arụ ọrụ multi-axis, na ebe a na-arụ ọrụ anọ (nwere ike ịhazi ngwa dị iche iche dị ka mkpa ndị ahịa si dị); a na-ahazi robọt maka ibu na ibutu.
2: Nhazi nke ebe a na-edozi ihe na-ekpuchi ọkara, na naanị ntinye na ntinye ka a na-edozi n'ọnọdụ egwu dị elu na nke dị ala, nke a na-eji maka ịkwanye na ịkwanye ozu valve.
3: Enwere ike inye ihe na-ebufe na nbudata ya site na feeder ma ọ bụ robot ọhụụ.
Nkọwa akpaaka akụkụ
1.The loading na unloading robot nwere ike họrọ mba ma ọ bụ ụlọ a maara nke ọma ụdị iji zute njem na ibu chọrọ nke a akpaka loading na nbudata;
2.The akụrụngwa na-anabata nchebe zuru oke, na-eji ngwá ọrụ na-ewepụ uzuzu, a na-agbanye ọnụ ụzọ nchebe na-akpaghị aka ma dọpụta ya dị ka ntụziaka, na ngwá ọrụ na-akpaghị aka clamped na chipped.
3.Mgbe emechara nhazi ahụ, a na-etinye workpiece ozugbo na eriri ebufe site na robot ma bufee ya na usoro ọzọ.
4.The robot gripper na-eji okpukpu abụọ grippers, nke a pụrụ iji mee ihe ọzọ iji mezue loading na nbudata nke igwe.